-
1 в той же плоскости
Makarov: flatУниверсальный русско-английский словарь > в той же плоскости
-
2 лежащий в одной и той же плоскости
Cartography: coplanarУниверсальный русско-английский словарь > лежащий в одной и той же плоскости
-
3 лежащий в той же плоскости
Naval: coplanarУниверсальный русско-английский словарь > лежащий в той же плоскости
-
4 находящийся в той же плоскости
Makarov: flatУниверсальный русско-английский словарь > находящийся в той же плоскости
-
5 лежащий и одной и той же горизонтальной плоскости
Cartography: horizontal coplanarУниверсальный русско-английский словарь > лежащий и одной и той же горизонтальной плоскости
-
6 сравнительные измерения
3.5 сравнительные измерения (comparative measurements): Измерения, проводимые на одном и том же газоходе в той же плоскости отбора проб в течение одного и того же периода времени с помощью проверяемой АИС и сравнительным методом, обеспечивающие получение пар результатов измерений.
Источник: ГОСТ Р ИСО 10849-2006: Выбросы стационарных источников. Определение массовой концентрации оксидов азота. Характеристики автоматических измерительных систем в условиях применения оригинал документа
3.7 сравнительные измерения (comparative measurements): Измерения, проводимые в одной и той же трубе в той же плоскости отбора проб в течение одного и того же периода времени с помощью проверяемой АИС и методом сравнения в точках, расположенных на коротком расстоянии друг от друга, обеспечивающие получение пар результатов измерений.
Источник: ГОСТ Р ИСО 12039-2011: Выбросы стационарных источников. Определение содержания монооксида углерода, диоксида углерода и кислорода. Характеристики и калибровка автоматических измерительных систем в условиях применения оригинал документа
Русско-английский словарь нормативно-технической терминологии > сравнительные измерения
-
7 коэффициент уменьшения дисбаланса
- unbalance reduction ratio
- U. R. R.
коэффициент уменьшения дисбаланса
Ндп. коэффициент снижения дисбаланса
Отношение уменьшения дисбаланса за одну корректировку масс к начальному дисбалансу в данной плоскости коррекции.
Примечания
1. Коэффициент уменьшения дисбаланса определяется по формуле

где D1 - значение начального дисбаланса; D2 - значение дисбаланса после одной корректировки масс в той же плоскости.
2. Коэффициент уменьшения дисбаланса есть мера эффективности уменьшения дисбаланса.
[ ГОСТ 19534-74]Недопустимые, нерекомендуемые
Тематики
EN
- U. R. R.
- unbalance reduction ratio
DE
FR
Русско-английский словарь нормативно-технической терминологии > коэффициент уменьшения дисбаланса
-
8 плоскость
ж.1. flatness2. ( поверхность) planeплоскость управления, направляющая плоскость ав. — control surface
в той же плоскости (прям. и перен.) — on the same plane
3. ( плоское замечание) platitude, commonplace remark -
9 серия измерений
серия измерений
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
3.13 серия измерений (measurement series): Последовательные измерения, проводимые в одной и той же плоскости отбора проб и при одних и тех же условиях контролируемого процесса.
Источник: ГОСТ Р ИСО 9096-2006: Выбросы стационарных источников. Определение массовой концентрации твердых частиц ручным гравиметрическим методом оригинал документа
Русско-английский словарь нормативно-технической терминологии > серия измерений
-
10 осевая центровка
3.1 осевая центровка (axial alignment): Колодку называют с «осевой центровкой», когда оси закрепляемых трубопроводов расположены в одной и той же плоскости.
Источник: ГОСТ Р ИСО 7661-2010: Колодки многоручьевые для крепления трубопроводов. Технические требования и методы испытаний оригинал документа
Русско-английский словарь нормативно-технической терминологии > осевая центровка
-
11 тип транспортного средства
тип транспортного средства
Транспортные средства, не имеющие между собой существенных различий в отношении следующих характеристик:
в случае механических транспортных средств:
1) категории транспортного средства (см. 1.1);
2) максимальной массы (в соответствии с определением, содержащимся в 2.17);
3) распределения массы по осям;
4) максимальной конструктивной скорости;
5) тормозных устройств различного типа, в частности наличия или отсутствия устройств для торможения прицепа, наличия системы электрического рекуперативного торможения;
6) числа, расположения и конструкции осей;
7) типа двигателя;
8) числа передач и значений передаточных чисел;
9) передаточных чисел ведущих мостов;
10) размеров шин;
в случае прицепов:
1) категории транспортного средства (см. 1.1);
2) максимальной массы (в соответствии с определением, содержащимся в 2.17);
3) распределения массы по осям;
4) типа тормозных устройств;
5) числа и расположения и конструкции осей;
6) размеров шин.
[ ГОСТ Р 41.13-2007]
тип транспортного средства
Механические транспортные средства, не имеющие между собой существенных различий, касающихся, в частности: размеров, формы и материалов тех элементов конструкции кузова транспортного средства или каркаса сиденья, или любой другой части транспортного средства, к которой крепятся ремни безопасности и удерживающие системы.
[ ГОСТ Р 41.16-2005]
тип транспортного средства
Транспортные средства, не имеющие между собой существенных различий в отношении следующих характеристик:
1) максимальной массы, определение которой приведено в 2.11,
2) распределения массы между осями,
3) максимальной расчетной скорости,
4) тормозного оборудования различного типа, в частности наличия или отсутствия оборудования для торможения прицепа или наличия тормозной системы с электрическим приводом,
5) типа двигателя,
6) числа передач и передаточных чисел,
7) передаточных чисел конечных передач,
8) размеров шин.
[ ГОСТ Р 41.13-Н-99]
тип транспортного средства
Механические транспортные средства, не имеющие между собой существенных различий; различия могут касаться формы или материала наружной поверхности.
[ ГОСТ Р 41.26-2001]
тип транспортного средства
Категория механических транспортных средств, не имеющих между собой существенных различий; в частности, эти различия могут касаться:
1) размеров, формы и материала элементов кабины транспортного средства или
2) крепления кабины к раме.
[ ГОСТ Р 41.29-99]
тип транспортного средства
Механические транспортные средства, не имеющие между собой существенных различий; в частности, эти различия могут касаться:
1) длины и ширины транспортного средства в той мере, в какой они влияют на результаты испытаний на удар, предписанных в настоящих Правилах;
2) конструкции, размеров, формы и материала той части транспортного средства, которая расположена впереди поперечной плоскости, проходящей через точку R сиденья водителя, и позади поперечной плоскости, проходящей через точку R заднего сиденья;
3) формы и внутренних размеров кабины в той мере, в какой они влияют на результаты испытаний на удар, предписанных в настоящих Правилах;
4) места расположения двигателя (спереди, сзади или посредине);
5) типа двигателя (с принудительным зажиганием или дизельный);
6) характеристик и места расположения топливного бака на транспортном средстве;
7) характеристик и места расположения системы подачи топлива (насос, фильтры и т.д.);
8) характеристик и расположения электрооборудования в той мере, в какой они влияют на результаты испытаний на удар, предписанных в настоящих Правилах.
[ ГОСТ Р 41.34-2001]
тип транспортного средства
Транспортные средства, не имеющие между собой существенных различий в отношении конструктивных особенностей, указанных в настоящем стандарте.
[ ГОСТ Р 41.36-2004]
тип ТС
ТС, не имеющие существенных различий в отношении следующих характеристик: конструкции, габаритных размеров, формы и материалов в местах крепления механического сцепного устройства или его элементов. Это касается как тягача, так и прицепа.
[ ГОСТ Р 41.55-2005]
тип транспортного средства
Механические транспортные средства, не имеющие между собой существенных различий, в частности в отношении наружной поверхности.
[ ГОСТ Р 41.61-2001]
тип транспортного средства
Механические транспортные средства, не имеющие существенных различий в отношении:
1) эквивалентной инерции, определяемой в зависимости от контрольной массы в соответствии с Г.5.1 приложения Г;
2) характеристик двигателя и транспортного средства в соответствии с приложением А.
[ ГОСТ Р 41.83-2004]
тип транспортного средства (в отношении передней обзорности)
Совокупность АТС, не имеющих между собой конструктивных различий, влияющих на показатели обзорности с места водителя, и отвечающие одним требованиям, установленным данным стандартом.
[ ГОСТ Р 51266-99]Тематики
EN
2.2 тип транспортного средства (vehicle type): Транспортные средства, не имеющие между собой существенных различий в отношении конструктивных особенностей, указанных в настоящем стандарте.
Источник: ГОСТ Р 41.52-2005: Единообразные предписания, касающиеся транспортных средств малой вместимости категорий М2 и М3 в отношении их общей конструкции оригинал документа
2.2 тип транспортного средства (vehicle type): Транспортные средства, не имеющие между собой существенных различий в отношении следующих характеристик:
2.2.1 в случае механических транспортных средств:
2.2.1.1 категории транспортного средства (см. 1.1);
2.2.1.2 максимальной массы (в соответствии с определением, содержащимся в 2.17);
2.2.1.3 распределения массы по осям;
2.2.1.4 максимальной конструктивной скорости;
2.2.1.5 тормозных устройств различного типа, в частности наличия или отсутствия устройств для торможения прицепа, наличия системы электрического рекуперативного торможения;
2.2.1.6 числа, расположения и конструкции осей;
2.2.1.7 типа двигателя;
2.2.1.8 числа передач и значений передаточных чисел;
2.2.1.9 передаточных чисел ведущих мостов;
2.2.1.10 размеров шин;
2.2.2 в случае прицепов:
2.2.2.1 категории транспортного средства (см. 1.1);
2.2.2.2 максимальной массы (в соответствии с определением, содержащимся в 2.17);
2.2.2.3 распределения массы по осям;
2.2.2.4 типа тормозных устройств;
2.2.2.5 числа и расположения и конструкции осей;
2.2.2.6 размеров шин.
Источник: ГОСТ Р 41.13-2007: Единообразные предписания, касающиеся транспортных средств категорий М, N и О в отношении торможения оригинал документа
2.16 тип транспортного средства (vehicle type): Механические транспортные средства, не имеющие между собой существенных различий, касающихся, в частности: размеров, формы и материалов тех элементов конструкции кузова транспортного средства или каркаса сиденья, или любой другой части транспортного средства, к которой крепятся ремни безопасности и удерживающие системы.
Источник: ГОСТ Р 41.16-2005: Единообразные предписания, касающиеся: I. Ремней безопасности и удерживающих систем для пассажиров и водителей механических транспортных средств; II. Транспортных средств, оснащенных ремнями безопасности оригинал документа
2.1 тип транспортного средства (vehicle type): Категория механических транспортных средств, не имеющих между собой различий в таких важных аспектах, как:
2.1.1 Длина, ширина и дорожный просвет транспортного средства в той мере, в какой они оказывают негативное влияние на характеристики, предписанные настоящим стандартом.
2.1.2 Конструкция, размеры, форма и материалы боковых стенок салона в той мере, в какой они оказывают негативное влияние на характеристики, предписанные настоящим стандартом.
2.1.3 Форма и внутренние размеры салона и тип защитных систем в той мере, в какой они оказывают негативное влияние на характеристики, предписанные настоящим стандартом;
2.1.4 Расположение двигателя (переднее, заднее или центральное).
2.1.5 Порожняя масса в той мере, в какой она оказывает негативное влияние на характеристики, предписанные настоящим стандартом.
2.1.6 Факультативные приспособления или элементы внутреннего оборудования в той мере, в какой они оказывают негативное влияние на характеристики, предписанные настоящим стандартом.
2.1.7 Тип переднего сиденья (сидений) и положение точки R в той мере, в какой они оказывают негативное влияние на характеристики, предписанные настоящим стандартом.
Источник: ГОСТ Р 41.95-2005: Единообразные предписания, касающиеся защиты водителя и пассажиров в случае бокового столкновения оригинал документа
2.1 тип транспортного средства (vehicle type): Механические транспортные средства, не имеющие существенных различий в отношении:
2.1.1 эквивалентной инерции, определяемой в зависимости от контрольной массы в соответствии с Г.5.1 приложения Г;
2.1.2 характеристик двигателя и транспортного средства в соответствии с приложением А.
Источник: ГОСТ Р 41.83-2004: Единообразные предписания, касающиеся сертификации транспортных средств в отношении выбросов вредных веществ в зависимости от топлива, необходимого для двигателей оригинал документа
Русско-английский словарь нормативно-технической терминологии > тип транспортного средства
-
12 сходимость
3.6 сходимость (repeatability): Близость результатов двух испытаний, полученных одним методом, в идентичных условиях, водной лаборатории.
Источник: ГОСТ Р ИСО 8586-2-2008: Органолептический анализ. Общее руководство по отбору, обучению испытателей и контролю за их деятельностью. Часть 2. Эксперты по сенсорной оценке оригинал документа
3.12 сходимость (repeatability): Значение, ниже которого, как можно ожидать, с заданной доверительной вероятностью находится абсолютная разность между результатами двух одиночных измерений, полученных с помощью одного и того же метода на идентичном измеряемом материале, одним и тем же оператором, использующим одну и ту же аппаратуру, в одной и той же лаборатории, за короткий промежуток времени (условия сходимости); при отсутствии других указаний доверительная вероятность составляет 95 %.
Источник: ГОСТ 31371.1-2008: Газ природный. Определение состава методом газовой хроматографии с оценкой неопределенности. Часть 1. Руководство по проведению анализа оригинал документа
3.21 сходимость (convergence): Точное пересечение электронных пучков цветной электронно-лучевой трубки (ЭЛТ) в определенной точке на плоскости ее люминофорного экрана (см. рисунок 3).
Нарушение сходимости - отклонение от сходимости (см. рисунок 4).
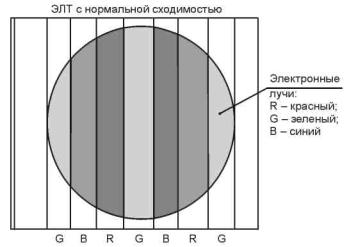
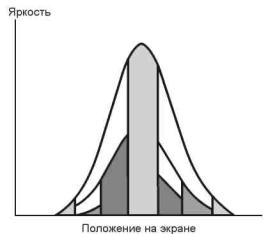
Рисунок 3 - ЭЛТ с нормальной сходимостью R, G, В электронных лучей
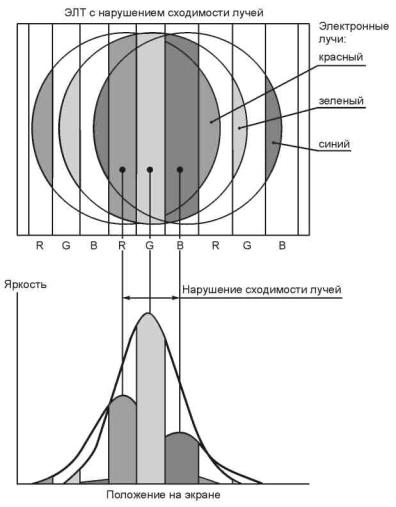
Рисунок 4 - ЭЛТ с нарушением сходимости R, G, В электронных лучей
Источник: ГОСТ Р ИСО 9241-8-2007: Эргономические требования при выполнении офисных работ с использованием видеодисплейных терминалов (ВДТ). Часть 8. Требования к отображаемым цветам оригинал документа
сходимость (repeatability): Способность весоизмерительного датчика выдавать последовательные согласованные результаты при одной и той же нагрузке, приложенной к весоизмерительному датчику несколько раз одним и тем же способом при постоянных условиях испытания.
[Международный словарь [1]]
Источник: ГОСТ Р 8.726-2010: Государственная система обеспечения единства измерений. Датчики весоизмерительные. Общие технические требования. Методы испытаний оригинал документа
3.30 сходимость (repeatability): Расхождение результатов измерений, полученных последовательно через короткие интервалы времени на образцах идентичного материала, одним и тем же методом, одними и теми же средствами, тем же самым наблюдателем, в той же самой лаборатории, в неизменных условиях окружающей среды.
Примечания
1. Временной интервал, равный приблизительно 10-кратному 90 %-ному времени реакции газоанализатора, допускается считать коротким интервалом.
2. Практически подход к измеряемому значению должен быть со стороны как меньших, так и больших значений измеряемой величины.
Источник: ГОСТ Р МЭК 61207-1-2009: Газоанализаторы. Выражение эксплуатационных характеристик. Часть 1. Общие положения оригинал документа
Русско-английский словарь нормативно-технической терминологии > сходимость
-
13 secondary principal stress
квазиглавное напряжение (линия пересечения произвольной плоскости, не совпадающей с главной и проходящей через центр поверхности напряжений Коши; представляет собой эллипс или гиперболу, полуоси которых определяют наибольшие и наименьшие нормальные напряжения в) той плоскости, называемые квазиглавными напряжениями)Англо-русский словарь промышленной и научной лексики > secondary principal stress
-
14 график функции
график функции
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]
график функции
1. Один из основных (наряду с таблицей, формулой, алгоритмом) способов задания функции: множество точек (x,y) плоскости с прямоугольными координатами, где x — любая точка области определения этой функции, а y=f(x). Здесь дана функция одного переменного y=f(x), и область ее определения Е. Соответственно, график представляет собой той или иной формы кривую (прямую при линейной функции). Поэтому, кстати, часто говорят о «форме» функции: линейной, синусоидальной, параболической и др. Аналогично, если задана функция двух переменных z=f(x,y), то графиком является множество всех точек (x, y, z) пространства, где (x,y) любая точка области определения этой функции, а z= f(x, y). В обоих этих случаях график может быть отображен на бумаге (см. иллюстрации Г.5-Г.7). В случаях функции большего числа переменных приходится прибегать к использованию абстрактных многомерных (n-мерных) пространств. Обычно графики строятся на основании таблиц, в которых указывается значение функции для каждого значения аргумента. Точность Г., построенного таким способом, зависит от того, насколько часто выбраны значения аргумента. Графики подвергаются разного рода преобразованиям, например, сжатию, параллельному переносу и т.п. Графики функций часто используются для приближенного решения уравнений, систем уравнений и неравенств. Рис.Г.4 Графики линейных функций
[ http://slovar-lopatnikov.ru/]Тематики
EN
Русско-английский словарь нормативно-технической терминологии > график функции
-
15 коэффициент усиления относительно короткой вертикальной антенны
коэффициент усиления относительно короткой вертикальной антенны
Выражаемое в децибелах отношение мощности, необходимой на входе эталонной антенны без потерь, к мощности, подводимой ко входу данной антенны, для создания в заданном направлении той же напряженности поля или такой же плотности потока мощности на том же расстоянии. Эталонной антенной является линейный проводник, длина которого значительно меньше четверти длины волны, перпендикулярный поверхности идеально проводящей плоскости, в которой находится заданное направление (Регламент радиосвязи, Ст.1, п.1.160).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > коэффициент усиления относительно короткой вертикальной антенны
-
16 коэффициент усиления относительно полуволнового диполя
коэффициент усиления относительно полуволнового диполя
Выражаемое в децибелах отношение мощности, необходимой на входе эталонной антенны без потерь, к мощности, подводимой ко входу данной антенны, для создания в заданном направлении той же напряженности поля или такой же плотности потока мощности на том же расстоянии. Эталонной антенной является изолированный в пространстве полуволновой диполь, в экваториальной плоскости которого находится заданное направление (Регламент радиосвязи, Ст.1, п.1.160).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > коэффициент усиления относительно полуволнового диполя
-
17 линейное программирование
линейное программирование
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]
линейное программирование
Область математического программирования, посвященная теории и методам решения экстремальных задач, характеризующихся линейной зависимостью между переменными. В самом общем виде задачу Л.п. можно записать так. Даны ограничения типа или в так называемой канонической форме, к которой можно привести все три указанных случая Требуется найти неотрицательные числа xj (j = 1, 2, …, n), которые минимизируют (или максимизируют) линейную форму Неотрицательность искомых чисел записывается так: Таким образом, здесь представлена общая задача математического программирования с теми оговорками, что как ограничения, так и целевая функция — линейные, а искомые переменные — неотрицательны. Обозначения можно трактовать следующим образом: bi — количество ресурса вида i; m — количество видов этих ресурсов; aij — норма расхода ресурса вида i на единицу продукции вида j; xj — количество продукции вида j, причем таких видов — n; cj — доход (или другой выигрыш) от единицы этой продукции, а в случае задачи на минимум — затраты на единицу продукции; нумерация ресурсов разделена на три части: от 1 до m1, от m1 + 1 до m2 и от m2 + 1 до m в зависимости от того, какие ставятся ограничения на расходование этих ресурсов; в первом случае — «не больше», во втором — «столько же», в третьем — «не меньше»; Z — в случае максимизации, например, объем продукции или дохода, в случае же минимизации — себестоимость, расход сырья и т.п. Добавим еще одно обозначение, оно появится несколько ниже; vi — оптимальная оценка i-го ресурса. Слово «программирование» объясняется здесь тем, что неизвестные переменные, которые отыскиваются в процессе решения задачи, обычно в совокупности определяют программу (план) работы некоторого экономического объекта. Слово, «линейное» отражает факт линейной зависимости между переменными. При этом, как указано, задача обязательно имеет экстремальный характер, т.е. состоит в отыскании экстремума (максимума или минимума) целевой функции. Следует с самого начала предупредить: предпосылка линейности, когда в реальной экономике подавляющее большинство зависимостей носит более сложный нелинейный характер, есть огрубление, упрощение действительности. В некоторых случаях оно достаточно реалистично, в других же выводы, получаемые с помощью решения задач Л.п. оказываются весьма несовершенными. Рассмотрим две задачи Л.п. — на максимум и на минимум — на упрощенных примерах. Предположим, требуется разработать план производства двух видов продукции (объем первого — x1; второго — x2) с наиболее выгодным использованием трех видов ресурсов (наилучшим в смысле максимума общей прибыли от реализации плана). Условия задачи можно записать в виде таблицы (матрицы). Исходя из норм, зафиксированных в таблице, запишем неравенства (ограничения): a11x1 + a12x2 ? bi a21x1 + a22x2 ? b2 a31x1 + a32x2 ? b3 Это означает, что общий расход каждого из трех видов ресурсов не может быть больше его наличия. Поскольку выпуск продукции не может быть отрицательным, добавим еще два ограничения: x1? 0, x2? 0. Требуется найти такие значения x1 и x2, при которых общая сумма прибыли, т.е. величина c1 x1 + c2 x2 будет наибольшей, или короче: Удобно показать условия задачи на графике (рис. Л.2). Рис. Л.2 Линейное программирование, I (штриховкой окантована область допустимых решений) Любая точка здесь, обозначаемая координатами x1 и x2, составляет вариант искомого плана. Очевидно, что, например, все точки, находящиеся в области, ограниченной осями координат и прямой AA, удовлетворяют тому условию, что не может быть израсходовано первого ресурса больше, чем его у нас имеется в наличии (в случае, если точка находится на самой прямой, ресурс используется полностью). Если то же рассуждение отнести к остальным ограничениям, то станет ясно, что всем условиям задачи удовлетворяет любая точка, находящаяся в пределах области, края которой заштрихованы, — она называется областью допустимых решений (или областью допустимых значений, допустимым множеством). Остается найти ту из них, которая даст наибольшую прибыль, т.е. максимум целевой функции. Выбрав произвольно прямую c1x1 + c2x2 = П и обозначив ее MM, находим на чертеже все точки (варианты планов), где прибыль одинакова при любом сочетании x1 и x2 (см. Линия уровня). Перемещая эту линию параллельно ее исходному положению, найдем точку, которая в наибольшей мере удалена от начала координат, однако не вышла за пределы области допустимых значений. (Перемещая линию уровня еще дальше, уже выходим из нее и, следовательно, нарушаем ограничения задачи). Точка M0 и будет искомым оптимальным планом. Она находится в одной из вершин многоугольника. Может быть и такой случай, когда линия уровня совпадает с одной из прямых, ограничивающих область допустимых значений, тогда оптимальным будет любой план, находящийся на соответствующем отрезке. Координаты точки M0 (т.е. оптимальный план) можно найти, решая совместно уравнения тех прямых, на пересечении которых она находится. Противоположна изложенной другая задача Л.п.: поиск минимума функции при заданных ограничениях. Такая задача возникает, например, когда требуется найти наиболее дешевую смесь некоторых продуктов, содержащих необходимые компоненты (см. Задача о диете). При этом известно содержание каждого компонента в единице исходного продукта — aij, ее себестоимость — cj ; задается потребность в искомых компонентах — bi. Эти данные можно записать в таблице (матрице), сходной с той, которая приведена выше, а затем построить уравнения как ограничений, так и целевой функции. Предыдущая задача решалась графически. Рассуждая аналогично, можно построить график (рис. Л.3), каждая точка которого — вариант искомого плана: сочетания разных количеств продуктов x1 и x2. Рис.Л.3 Линейное программирование, II Область допустимых решений здесь ничем сверху не ограничена: нужное количество заданных компонентов тем легче получить, чем больше исходных продуктов. Но требуется найти наиболее выгодное их сочетание. Пунктирные линии, как и в предыдущем примере, — линии уровня. Здесь они соединяют планы, при которых себестоимость смесей исходных продуктов одинакова. Линия, соответствующая наименьшему ее значению при заданных требованиях, — линия MM. Искомый оптимальный план — в точке M0. Приведенные крайне упрощенные примеры демонстрируют основные особенности задачи Л.п. Реальные задачи, насчитывающие много переменных, нельзя изобразить на плоскости — для их геометрической интерпретации используются абстрактные многомерные пространства. При этом допустимое решение задачи — точка в n-мерном пространстве, множество всех допустимых решений — выпуклое множество в этом пространстве (выпуклый многогранник). Задачи Л.п., в которых нормативы (или коэффициенты), объемы ресурсов («константы ограничений«) или коэффициенты целевой функции содержат случайные элементы, называются задачами линейного стохастического программирования; когда же одна или несколько независимых переменных могут принимать только целочисленные значения, то перед нами задача линейного целочисленного программирования. В экономике широко применяются линейно-программные методы решения задач размещения производства (см. Транспортная задача), расчета рационов для скота (см. Задача диеты), наилучшего использования материалов (см. Задача о раскрое), распределения ресурсов по работам, которые надо выполнять (см. Распределительная задача) и т.д. Разработан целый ряд вычислительных приемов, позволяющих решать на ЭВМ задачи линейного программирования, насчитывающие сотни и тысячи переменных, неравенств и уравнений. Среди них наибольшее распространение приобрели методы последовательного улучшения допустимого решения (см. Симплексный метод, Базисное решение), а также декомпозиционные методы решения крупноразмерных задач, методы динамического программирования и др. Сама разработка и исследование таких методов — развитая область вычислительной математики. Один из видов решения имеет особое значение для экономической интерпретации задачи Л.п. Он связан с тем, что каждой прямой задаче Л.п. соответствует другая, симметричная ей двойственная задача (подробнее см. также Двойственность в линейном программировании). Если в качестве прямой принять задачу максимизации выпуска продукции (или объема реализации, прибыли и т.д.), то двойственная задача заключается, наоборот, в нахождении таких оценок ресурсов, которые минимизируют затраты. В случае оптимального решения ее целевая функция — сумма произведений оценки (цены) vi каждого ресурса на его количество bi— то есть равна целевой функции прямой задачи. Эта цена называется объективно обусловленной, или оптимальной оценкой, или разрешающим множителем. Основополагающий принцип Л.п. состоит в том, что в оптимальном плане и при оптимальных оценках всех ресурсов затраты и результаты равны. Оценки двойственной задачи обладают замечательными свойствами: они показывают, насколько возрастет (или уменьшится) целевая функция прямой задачи при увеличении (или уменьшении) запаса соответствующего вида ресурсов на единицу. В частности, чем больше в нашем распоряжении данного ресурса по сравнению с потребностью в нем, тем ниже будет оценка, и наоборот. Не решая прямую задачу, по оценкам ресурсов, полученных в двойственной задаче, можно найти оптимальный план: в него войдут все технологические способы, которые оправдывают затраты, исчисленные в этих оценках (см. Объективно обусловленные (оптимальные) оценки). Первооткрыватель Л.п. — советский ученый, академик, лауреат Ленинской, Государственной и Нобелевской премий Л.В.Канторович. В 1939 г. он решил математически несколько задач: о наилучшей загрузке машин, о раскрое материалов с наименьшими расходами, о распределении грузов по нескольким видам транспорта и др., при этом разработав универсальный метод решения этих задач, а также различные алгоритмы, реализующие его. Л.В.Канторович впервые точно сформулировал такие важные и теперь широко принятые экономико-математические понятия, как оптимальность плана, оптимальное распределение ресурсов, объективно обусловленные (оптимальные) оценки, указав многочисленные области экономики, где могут быть применены экономико-математические методы принятия оптимальных решений. Позднее, в 40—50-х годах, многое сделали в этой области американские ученые — экономист Т.Купманс и математик Дж. Данциг. Последнему принадлежит термин «линейное программирование». См. также: Ассортиментные задачи, Базисное решение, Блочное программирование, Булево линейное программирование, Ведущий столбец, Ведущая строка, Вершина допустимого многогранника, Вырожденная задача, Гомори способ, Граничная точка, Двойственная задача, Двойственность в линейном программировании, Дифференциальные ренты, Дополняющая нежесткость, Жесткость и нежесткость ограничений ЛП, Задача диеты, Задача о назначениях, Задача о раскрое, Задачи размещения, Исходные уравнения, Куна — Таккера условия, Множители Лагранжа, Область допустимых решений, Опорная прямая, Распределительные задачи, Седловая точка, Симплексная таблица, Симплексный метод, Транспортная задача.
[ http://slovar-lopatnikov.ru/]Тематики
- экономика
- электросвязь, основные понятия
EN
Русско-английский словарь нормативно-технической терминологии > линейное программирование
-
18 плоский механизм
плоский механизм
Механизм, подвижные звенья которого совершают плоское движение, параллельное одной и той же неподвижной плоскости.
Примечание
Все остальные механизмы относятся к «пространственным механизмам».
[Сборник рекомендуемых терминов. Выпуск 99. Теория механизмов и машин. Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]Тематики
Обобщающие термины
EN
DE
FR
Русско-английский словарь нормативно-технической терминологии > плоский механизм
См. также в других словарях:
Вращение плоскости поляризации — (оптика) явление, происходящее с лучами поляризованного света, проходящими через некоторые кристаллы, жидкости и пары, находящиеся в естественном состоянии или же под влиянием магнетизма. Световые лучи, исходящие от самосветящихся тел (солнце,… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Преобразование плоскости — Здесь собраны определения терминов из планиметрии. Курсивом выделены ссылки на термины в этом словаре (на этой странице). # А Б В Г Д Е Ё Ж З И Й К Л М Н О П Р С Т У Ф … Википедия
По наклонной плоскости — (иноск.) покатой, (въ смыслѣ постепеннаго нравственнаго паденія); или (матем.) наклоненіе линіи или плоскости къ другой (наклонъ покатость). Ср. Онъ хотѣлъ ей позолотить пилюлю, но его прощаніе съ нею значило, что онъ и ее видитъ на той же… … Большой толково-фразеологический словарь Михельсона (оригинальная орфография)
по наклонной плоскости — (иноск.) покатой (в смысле постепенного нравственного падения); или (матем.) наклонение линии или плоскости к другой (наклон покатость) Ср. Он хотел ей позолотить пилюлю, но его прощание с нею значило, что он и ее видит на той же наклонной… … Большой толково-фразеологический словарь Михельсона
Свет* — Содержание: 1) Основные понятия. 2) Teopия Ньютона. 3) Эфир Гюйгенса. 4) Принцип Гюйгенса. 5) Принцип интерференции. 6) Принцип Гюйгенса Френеля. 7) Принцип поперечности колебаний. 8) Завершение эфирной теории света. 9) Основание эфирной теории.… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Свет — Содержание: 1) Основные понятия. 2) Теория Ньютона. 3) Эфир Гюйгенса. 4) Принцип Гюйгенса. 5) Принцип интерференции. 6) Принцип Гюйгенса Френеля. 7) Принцип поперечности колебаний. 8) Завершение эфирной теории света. 9) Основание эфирной теории.… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Вращательная способность химических соединений — Под именем вращательной способности химических соединений подразумевается способность, присущая некоторым из них, отклонять плоскость поляризации светового луча от ее первоначального направления. Допустим, что в луче такого поляризованного света… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
ЦИКЛОТРОННЫЙ РЕЗОНАНС — избирательное поглощение или отражение электромагн. волн проводниками, помещёнными в постоянное магн. поле, на частотах, равных или кратных циклотронной частоте носителей заряда. В пост. магн. поле Н заряженные ч цы движутся по спиралям, оси… … Физическая энциклопедия
Ориентация (в геометрии) — Ориентация, обобщение понятия направления на прямой на геометрической фигуре более сложной структуры. Ориентация на прямой. Точка может двигаться по прямой в двух противоположных направлениях. Например, по горизонтальной прямой АВ (рис. 1)… … Большая советская энциклопедия
Ориентация — I Ориентация (франц. orientation, буквально направление на восток, от лат. oriens восток) умение разобраться в окружающей обстановке. Направление научной, общественной, политической деятельности. II Ориентация обобщение понятия… … Большая советская энциклопедия
Экспериментальная эмбриология* — иначе механика развития, хотя было бы правильнее ее называть физиологией развития занимается изучением развития животных при искусственных условиях. Если эмбриология (см.) вообще изучает морфологическую сторону развития и пытается ответить на… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона